FM/BG-1644 - Common unmanned systems acronyms and definitions
This guide provides commonly used terminology for unmanned and remotely piloted systems.
- RPV - Remotely Piloted Vehicle
- Catch all term, includes UAVs, UGVs, USVs, and UUVs.
- UAV - Unmanned Aerial Vehicle
- Any aerial vehicle capable of autonomous or remote operation.
- UGV - Unmanned Ground Vehicle
- Any ground-based vehicle capable of autonomous or remote operation.
- USV - Unmanned Surface Vehicle
- Any surface-level aquatic vehicle capable of autonomous or remote operation.
- UUV - Unmanned Underwater Vehicle
- Any underwater vehicle capable of autonomous or remote operation.
- U[X]S or RPS - Unmanned [Type] System / Remotely Piloted System
- Refers to the full operational network supporting a vehicle, including pilot, communications links, controller, and launch infrastructure.
- sUAV - Small Unmanned Aerial Vehicle
- Small, often hand-launched UAVs with limited range and endurance. Commonly includes modified commercial quadcopters or similar platforms.
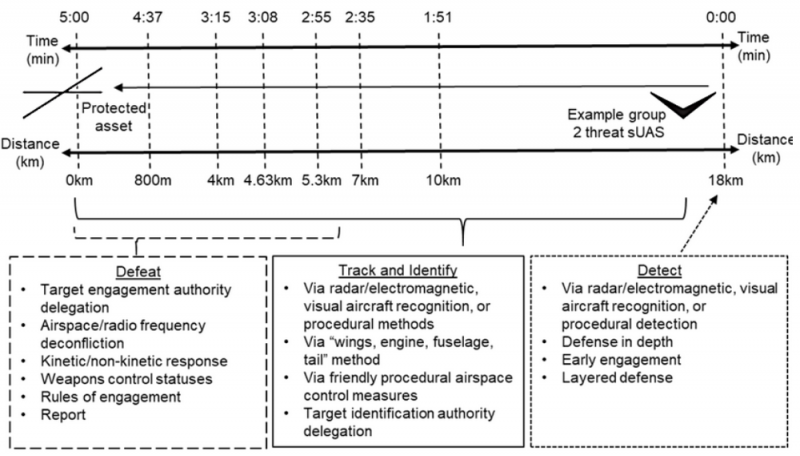
- CUAS - Counter-UAS
- Actions, equipment, and systems used to detect, deter, defeat, or defend against UAS threats.